AnalogEVSE
Eine einfache analoge Ladesteuerung nach
SAE J1772
Letzte Aktualisierung: 2023-08-31
|
|
1.
Überblick
AnalogEVSE ist eine
einfache Ladesteuerung für Elektrofahrzeuge nach SAE J1772. Der
Ladestrom kann von 8A bis ca. 64A mit einem Widerstand oder einer
Steuerspannung eingestellt werden.
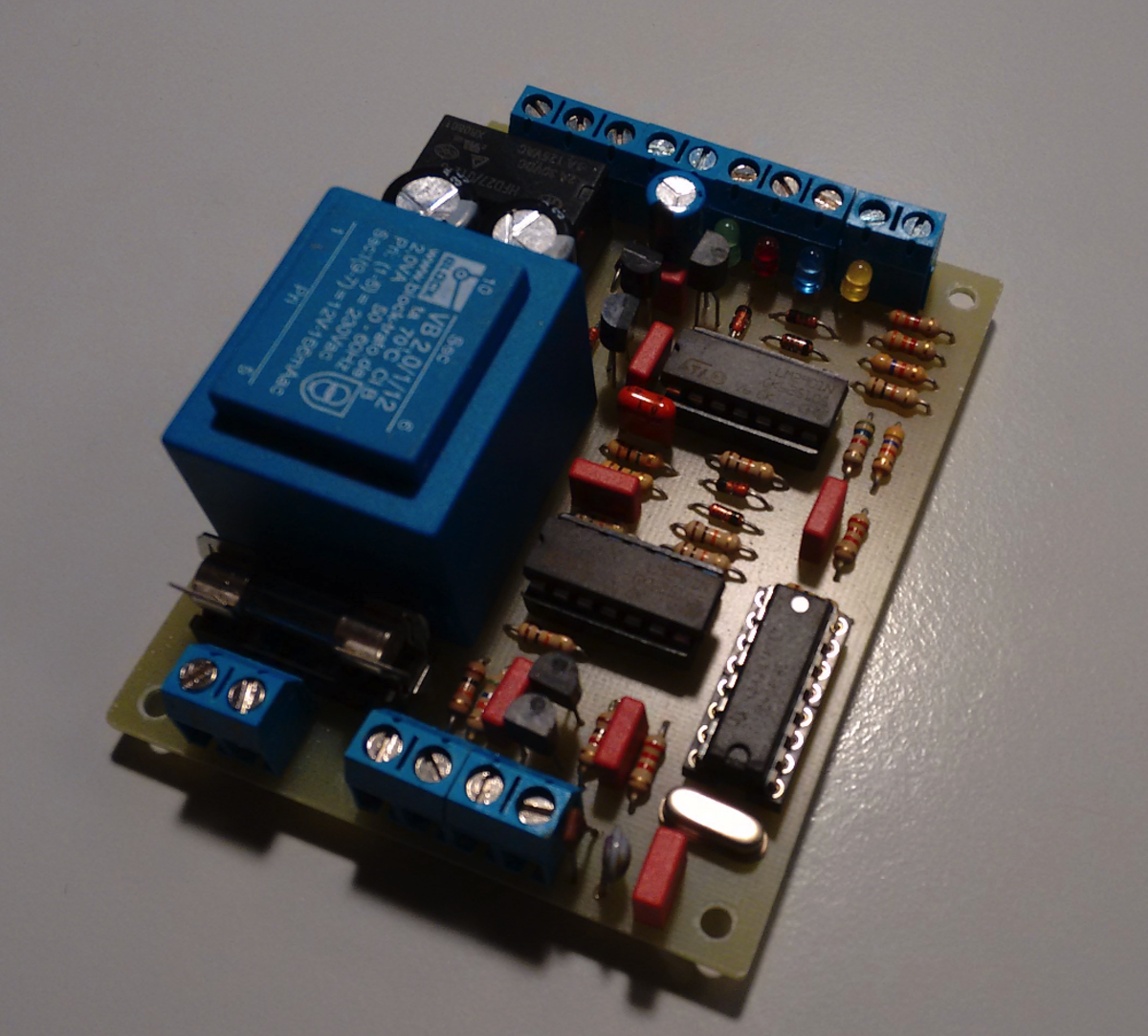
Die gesamte Schaltung (Netzteil und Pilotsignal-Management) ist
auf einer einzigen Platine von ca. 6.5 cm x 8.5 cm untergebracht,
die genau in das abgebildete 4TE Hutschienengehäuse passt. Sie ist
damit 30% kleiner als die Vorgängerversion und benötigt zudem
keinen Frequenzabgleich mehr. Die Steuerung erzeugt das
Pilotsignal, misst die Signalpegel und bedient das Relais, das das
Schütz schaltet.
Ich habe Wert auf die Verwendung von gängigen
Allerweltskomponenten gelegt. Verwendet werden 2 LM2901 oder LM239
4-fach Komparatoren (LM339 mit erweitertem Temperaturbereich), ein
CD4060, ein paar Transistoren und eine handvoll Kleinteile. Alles
ist analog und es gibt keine Firmware. Bei den Transistoren können
praktisch alle Typen der richtigen Bauart (NPN/PNP) verwendet
werden. Die Kosten für alle Bauteile der einbaufertigen Steuerung
sollten maximal im Bereich von 50€ liegen. Die Platine ist
einseitig mit ausreichend breiten Leiterbahnen und kann auch von
Hobbybastlern produziert werden.
Die Platine hat folgende Anschlüsse:
- 230V Netzspannung
- Relais (isoliert)
250V/500mA max. 1x Schließer, 1x Umschalter
- Pilotsignal
- Widerstand zum
Einstellen des Ladestroms (Impulsbreite)
- LEDs
- Idle (weiss/gelb)
- EV connected
(grün)
- Charging (blau)
- Error (rot)
Die meisten anderen mir
bekannten analogen Ladesteuerung erzeugen nur die positive
Halbwelle des Pilotsignals. Da viele Autos die negative Halbwelle
nicht auswerten, funktioniert dieses Verfahren bei diesen
Fahrzeugen, obwohl es nicht dem J1772 Standard entspricht. Der
negative Teil des Pilotsignals wird allerdings für den Diodentest
benötigt, der das wichtigste Sicherheitsfeature des Standards
darstellt. AnalogEVSE erzeugt ein standardkonformes -12V/+12V
Pilotsignal und unterstützt den Diodentest. Regenwasser, Schlamm
oder Kinderfinger können somit den Ladestrom nicht einschalten.
Solange kein Fahrzeug angeschlossen ist, liegt das Pilotsignal auf
12V DC.
Das Schütz wird auch eingeschaltet, wenn das Fahrzeug anzeigt,
dass es Lüftung benötigt ("Ventilation Required"). Einen
zusätzlichen Ausgang zum Schalten eines Lüfters gibt es nicht,
daher darf die Schaltung bei Fahrzeugen mit Bleibatterien nur im
Freien verwendet werden.
Der Ladevorgang beginnt automatisch, wenn der Stecker am Auto
eingesteckt ist. Es gibt keinen extra Knopf zum Starten der
Ladung.
Folgende Fahrzeuge wurden bisher erfolgreich mit AnalogEVSE
getestet:
- Renault ZOE (alle
Modelle)
- Hyundai IONIQ
electro
- Mercedes B-Klasse ED
- BMW i3
- BMW i8
- BMW eDrive
- Tesla Model S und X
- Smart ED (altes und
neues Modell)
- Toyota Prius Plugin
- Kia Soul EV
- VW Passat GTE
- VW Golf GTE
- VW E-Up!
- VW E-Golf
- Nissan Leaf
- Audi A3 e-tron
- Opel Ampera-e
2.
Warum noch eine Ladesteuerung?
Drei Dinge haben mich
motiviert: Neugier, Kosten und Einfachheit. Kommerzielle
Ladesteuerungen (z.B. Phoenix Contact, Wago..) sind relativ teuer
und bieten einen Funktionsumfang, den ich nicht brauche. Ich
schalte die Stromstärke selten um und würde dies am liebsten mit
einem einfachen Drehschalter tun, anstatt mich durch ein Menü zu
tasten. Außerdem möchte ich eine einfache Statusanzeige, bei der
ich mit einem Blick den Zustand sehen kann und nicht erst das
Display lesen muss. Dinge wie Echtzeituhr, Netzwerkanschluss,
Ladestatistiken, WLAN oder komplexe Zungangskontrollfeatures
brauche ich nicht.
Also habe ich den SAE
J1772 Standard mal genauer untersucht. Eine einfache
Ladesteuerung ist mit einer analogen Schaltung ohne großen Aufwand
zu realisieren. Es gibt ein paar analoge Ladesteuerungen im
Internet aber sie sind entweder zu minimalistisch/unsicher (BareEVSE),
ignorieren Teile des Standards (kein Diodentest) oder veröffentlichen
keinen Schaltplan. Aus diesem Grund habe ich beschlossen,
eine einfache analoge Ladesteuerung zu entwerfen, die bestmöglich
dem J1772 Standard entspricht, ein +/-12V Pilotsignal liefert und
den Diodentest als wichtigstes Sicherheitsfeature unterstützt.
Die Einfachheit der Schaltung war mir dabei besonders wichtig. Im
Gegensatz zur Vorgängerversion werden weniger Bauteile verwendet,
der Stromverbrauch liegt niedriger, die Platine ist um 30%
geschrumpft und es ist nun kein Abgleich der Frequenz mehr nötig,
da diese durch einen Quarzoszillator stabilisiert wird. Nach dem
Zusammenbau ist der Controller daher direkt einsatzbereit. Das
Layout ist simpel und die Schaltung ist robust und tolerant gegen
Aufbaufehler. Eine Fehlersuche ist in der Regel mit einfachen
Mitteln möglich, wodurch dieses Design z.B. auch für den Einsatz
in weniger entwickelten Ländern der Welt interessant sein könnte.
3. Schaltungszustände &
LEDs
Die folgende Tabelle
zeigt, welche LEDs bei welchen Zuständen leuchten.
|
LED gelb
Idle
|
LED grün
Connected |
LED blau
Charging |
LED rot
Error |
| Kein Fahrzeug |
an
|
aus |
aus |
aus |
| Fahrzeug angeschlossen |
aus
|
an
|
aus |
aus |
| Fahrzeug lädt |
aus |
aus |
an
|
aus |
| Fahrzeug verlangt Lüftung |
aus |
aus |
an |
aus |
| Pilotsignal Kurzschluss |
aus |
aus |
aus |
an2 |
| Diodentest Fehler |
aus |
aus |
aus |
an1,2 |
1 nur bei
verbundenem Fahrzeug
2
J1772 schreibt -12V DC vor. Siehe Kapitel Einschränkungen.
Hinweis: statt
einzelner externer LEDs kann z.B. auch für rot, grün und blau eine
RGB LED mit gemeinsamer Anode verwendet werden. Die Idle LED ist
optional, die drei anderen LEDs (rot, grün und blau) müssen
entweder alle weggelassen oder vollzählig angeschlossen werden, da
sonst an den externen LEDs falsche Zustände angezeigt werden.
4. Ladestromwahl
Der Ladestrom kann mit
einem externen Widerstand anhand der folgenden Tabelle eingestellt
werden. Zwischenwerte oder ein Potentiometer für stufenlose
Einstellung sind selbstverständlich möglich, da die Schaltung
analog arbeitet. Zwei Dinge sind hierbei zu bedenken:
- das Verhältnis von
Widerstand zu Ladestrom ist nicht linear
- die Ladeströme sind
Richtwerte, die ich mit dem Oszilloskop errechnet habe. Im
wahren Leben können sie durch Bauteiltoleranzen und
Umgebungsfaktoren (z.B. Temperatur) leicht abweichen.
Rext
|
Ladestrom |
--
|
8A
|
220k
|
10A
|
100k
|
12A
|
56k
|
16A
|
33k
|
20A
|
22k
|
24A
|
15k
|
27A
|
|
Rext
|
Ladestrom |
| 10k |
32A |
| 6k8 |
36A |
| 4k7 |
40A |
| 3k3 |
45A |
| 2k7 |
48A |
2k2
|
50A
|
1k5
|
64A
|
|
Alternativ kann der Ladestrom auch durch eine Steuerspannung
zwischen ca. 1,5V (64A) und 10V (8A) durch eine externe
Spannungsquelle, z.B. eine Photovoltaikanlage geregelt werden.
Bezugsspannung ist hierbei die Masse der Schaltung, die in der
Ladebox mit dem Schutzleiter verbunden wird. Dieser Umstand muss
u.U. beim Verbinden der externen Spannungsquelle berücksichtigt
werden.
5. Schaltungsbeschreibung
Netzteil
Das
Netzteil ist eine einfache stabilisierte +/-12V Versorgung,
aufgebaut mit je einem 78L12/79L12. Der Strombedarf der
Schaltung ist so gering, dass eine Halbwellengleichrichtung
ausreicht, die Leistungsaufnahme liegt insgesamt bei ca. 1W.
Wichtig: die negative Spannungsversorgung ist nur stabil,
wenn sie mit ein paar mA belastet wird, daher darf die on-board
Idle LED nicht weggelassen werden.
Rechtecksignal
Ein
Quarzoszillator erzeugt über ein RC-Glied ein dreieckartiges
Signal, das von einem zweiten Komparator in ein Rechtecksignal
umgewandelt wird. Die Referenzspannung dieses zweiten
Komparators legt die Impulsbreite fest und kann mit einem
externen Widerstand eingestellt werden. Ohne externen Widerstand
beträgt der Ladestrom 8A.
Spannungsfenstererkennung
Das
Rechtecksignal wird in die positive und die negative Halbwelle
gesplittet. Beide werden gleichgerichtet und zu einer glatten
Spitzen-Gleichspannung gesiebt. Die negative Spitzenspannung
muss jederzeit unter ca. -8V liegen, sonst spricht der
Diodentest an und die Schaltung geht in den Fehlerzustand.
Liegt
die positive Spitzenspannung unter ca. 10V, hat die Steuerung
das Auto erkannt und die grüne "EV connected" LED leuchtet.
Liegt sie zwischen ca. 7V und 2V, zieht das Relais und die blaue
"EV charging" LED geht an. Bei einer positiven Spannung unter 2V
(Kurzschluss) geht die Schaltung in den Fehlerzustand und die
rote LED leuchtet. Die verschiedenen Referenzspannungen werden
durch eine einfache Kette von Widerständen erzeugt.
Pilotsignal
Das
Pilotsignal wird von zwei Komparatoren erzeugt und von einer
Transistor-Komplementärstufe niederohmig verstärkt. Ist kein
Auto verbunden, liegt es auf +12V DC.
Relaistreiber
Parallel zum Relais
liegt ein 47μF Kondensator, der ein Prellen des Relais
verhindert. Bei manchen E-Auto Modellen (z.B. Renault ZOE) kann
ein prellendes Relais in der Steuerung bei 3-phasiger Ladung zur
Zerstörung des Ladegerätes führen.
LED Treiber
Die LED Treiberschaltung
nutzt die unterschiedlichen Durchlassspannungen der LEDs und
Zenerdioden, so dass in den verschiedenen Zuständen der Schaltung
nur jeweils eine LED leuchtet, auch wenn mehrere eingeschaltet
sind.
6.
Not-Aus
Ein Not-Aus Knopf ist
nicht Bestandteil der Schaltung, lässt sich aber leicht
realisieren. Er kann so angeschlossen werden, dass er bei
Betätigung die Netzspannung zur Platine unterbricht. Damit wird
die Steuerung stromlos, schaltet das Schütz aus und trennt das
Auto vom Netz. Im Interesse der Sicherheit ist diese
Notabschaltung empfehlenswert. Sie sollte aber nur im Notfall
verwendet werden, da das Auto es vorzieht, den Ladevorgang
kontrolliert zu beenden.
Hinweis: diese Art von Not-Aus genügt möglicherweise nicht
den gesetzlichen Vorschriften.
7. Zugangskontrolle
Eine einfache
(mechanische) Zugangskontrolle lässt sich auf mehrere Arten
realisieren:
- Es wird ein
abschließbarer Not-Aus Knopf verwendet, so dass nur mit
Schlüssel der Strom eingeschaltet werden kann
- Ein
netzspannungsfähiger Schlüsselschalter wird in Reihe zum
Not-Aus Knopf geschaltet, so dass die Steuerung nur aktiv ist,
wenn der Schlüsselschalter an und Not-Aus nicht gedrückt ist.
- Ein
Niederspannungsschalter wird ins Pilotsignal eingeschleift.
Ist der Schalter offen, sieht die Ladesteuerung das Auto
nicht. Somit bleibt die Schaltung inaktiv und das Schütz wird
auch nie eingeschaltet.
8. Einschränkungen
- Die Schaltung ist
für Ladeströme bis ca. 64A konzipiert. Da ich nur maximal 32A
bereitstellen kann, habe ich die Funktion für höhere Ströme
bis jetzt nicht verifizieren können.
- Fahrzeuge, die eine
Lüftung anfordern (Bleibatterien) dürfen mit AnalogEVSE nur im
Freien laden, da kein Schaltausgang für einen Lüfter zur
Verfügung steht. Dies scheint bei aktuellen Fahrzeugen aber
eher ein akademisches Problem zu sein, da diese Art von Akkus
praktisch nicht verwendet werden.
- Im Fehlerzustand
führt das Pilotsignal ein Rechtecksignal, während der J1772
Standard -12V DC vorschreibt. Das Relais ist jedoch bei
Fehlern immer offen, d.h. am Fahrzeug liegt keine Spannung an.
Obwohl dies dem Standard widerspricht, kann ich darin kein
Problem erkennen. Selbst wenn das Auto zu laden versucht, ist
es ohne Spannung.
- AnalogEVSE wurde
zwar schon an einer Reihe von Fahrzeugtypen getestet, eine
Garantie für das Zusammenspiel mit mir unbekannten Modellen
kann ich aber nicht geben. Trotzdem sehe ich keinen Grund,
warum die Steuerung mit anderen Fahrzeugen nicht funktionieren
sollte. Ich selbst lade meinen ZOE seit etwa 3 Jahren
ausschließlich an AnalogEVSE Steuerungen.
- LM339 sind nur für
den Temperaturbereich 0 - 70°C spezifiziert. Bei Montage im
Außenbereich ist es sinnvoll, stattdessen LM2901 oder LM239 zu
verwenden. Diese besitzen einen stark erweiterten
Temperaturbereich und werden im Bausatz verwendet.
9. Hinweise & Modding
9.1 Lastverteilung
Sollen zwei Fahrzeuge an
einem Stromanschluss geladen werden, wird man in der Regel jeder
Steuerung die halbe Anschlussleistung zur Verfügung stellen.
Werden beide Fahrzeuge gleichzeitig angeschlossen, bleibt so die
Leistung im erlaubten Rahmen. Ist allerdings nur ein Fahrzeug
angeschlossen, wird die halbe Leistung des Stromanschlusses
verschenkt und das alleine ladende Fahrzeug könnte doppelt so
schnell fertig sein.
In diesem Fall hilft eine Lastverteilung, die die verfügbare
Stromstärke eines Ladeanschlusses anhand der Anzahl von ladenden
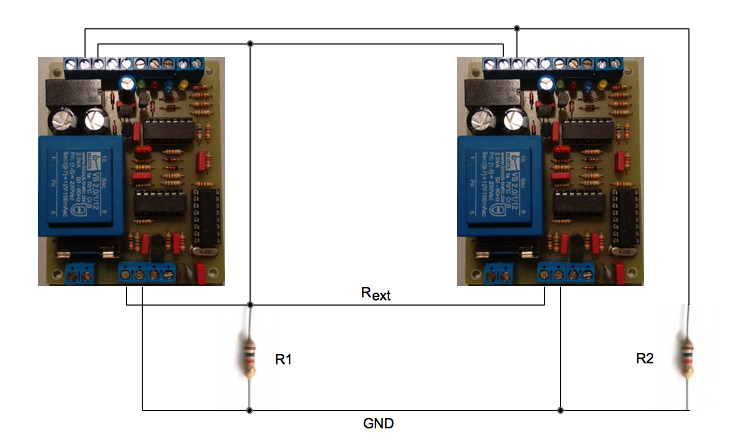
Fahrzeugen reguliert. Bei einer Ladestation mit zwei AnalogEVSE
Controllern kann eine einfache Lastverteilung mit einem einzigen
zusätzlichen Widerstand realisiert werden. Hierfür wird an beiden
Steuerungen der ungenutzte zweite Relaisausgang verwendet. Dieser
wird so verbunden, dass zwei Stromcodierwiderstände (R1 und R2)
parallelgeschaltet sind, solange nur ein Auto lädt. Laden zwei
Autos gleichzeitig, wird einer der beiden Widerstände (R2)
abgetrennt. Hierdurch steigt der resultierende Codierwiderstand
und beide Controller bieten ihrem Auto nur noch den halben Strom
an.
Die Werte von R1 und R2 sind voneinander abhängig und müssen
sorgfältig gewählt werden, um unter allen Umständen eine
Überlastung des Stromanschlusses zu vermeiden. Um die Werte der
Widerstände zu bestimmen, muss zuerst der Strom festgelegt werden,
der einem Fahrzeug alleine (Vollast) zur Verfügung gestellt werden
soll. Der hierfür erforderliche Codierwiderstand Rext1
wird aus der Tabelle ermittelt. Dann
wird der Codierwiderstand Rext2 für den halben Strom
ermittelt. Nun können die Widerstände berechnet werden:
R1 = Rext2 / 2
R2 = 1 / (2 / Rext1 - 1 / R1)
Beispiel:
Ein Fahrzeug alleine soll mit 32A laden können, zwei Fahrzeuge
gleichzeitig mit je 16A. Anhand der Tabelle ergeben sich hieraus:
Rext1 = 10k (Codierwiderstand für 32A)
Rext2 = 56k (Codierwiderstand für 16A)
Mit den oben angegebenen Formeln können jetzt R1 und R2 berechnet
werden. Wenn die errechneten Werte nicht durch Standardwerte
realisiert werden können, kann stattdessen ein Trimmpoti, eine
Kombination von mehreren Widerständen oder der nächste Wert aus
der Standardserie benutzt werden.
R1 = Rext2 / 2 = 56000 / 2 = 28000 nächster
Standardwert 27k
R2 = 1 / (2 / Rext1 - 1 / R1) = 1 / (2 / 10000 -
1 / 27000) = 6136
nächster Standardwert 6.8k
Im Zweifelsfall sollten die Widerstände eher zu groß als zu klein
gewählt werden, damit der Ladestrom nicht zu groß wird.
9.3 Weitere Hinweise
- Soll die Ladebox
ohne Wahlmöglichkeit auf eine feste Stromstärke eingestellt
werden, können der Anschlussblock P6 und der Widerstand R13
weggelassen werden. Stattdessen wird das Poti RV1 eingesetzt,
mit dem auf der Platine die Stromstärke stufenlos gewählt
werden kann. Der Widerstandswert am Poti kann aus der
Parallelschaltung von R13 (56k) und dem Codierwiderstand Rext
anhand der Tabelle berechnet
werden.
- Soll die Ladebox
verschiedene Stromstärken unterstützen, können an Rext mit
einem Drehschalter verschiedene Widerstände geschaltet werden.
Alternativ ist die Verwendung eines externen Potis zur
stufenlosen Einstellung möglich, wegen der schlechten
Feinabstimmung bei großen Stromstärken aber nicht zu
empfehlen.
- Wird die Ladebox im
Freien montiert, muss ein passendes Gehäuse (IP64 oder besser)
verwendet werden. Wasser und Strom vertragen sich nicht.
- Bei der Verdrahtung
sollte darauf geachtet werden, dass die Aderfarben den
nationalen oder firmenspezifischen Vorschriften entsprechen.
10.
Bauanleitung
10.1 Allgemeine
Hinweise
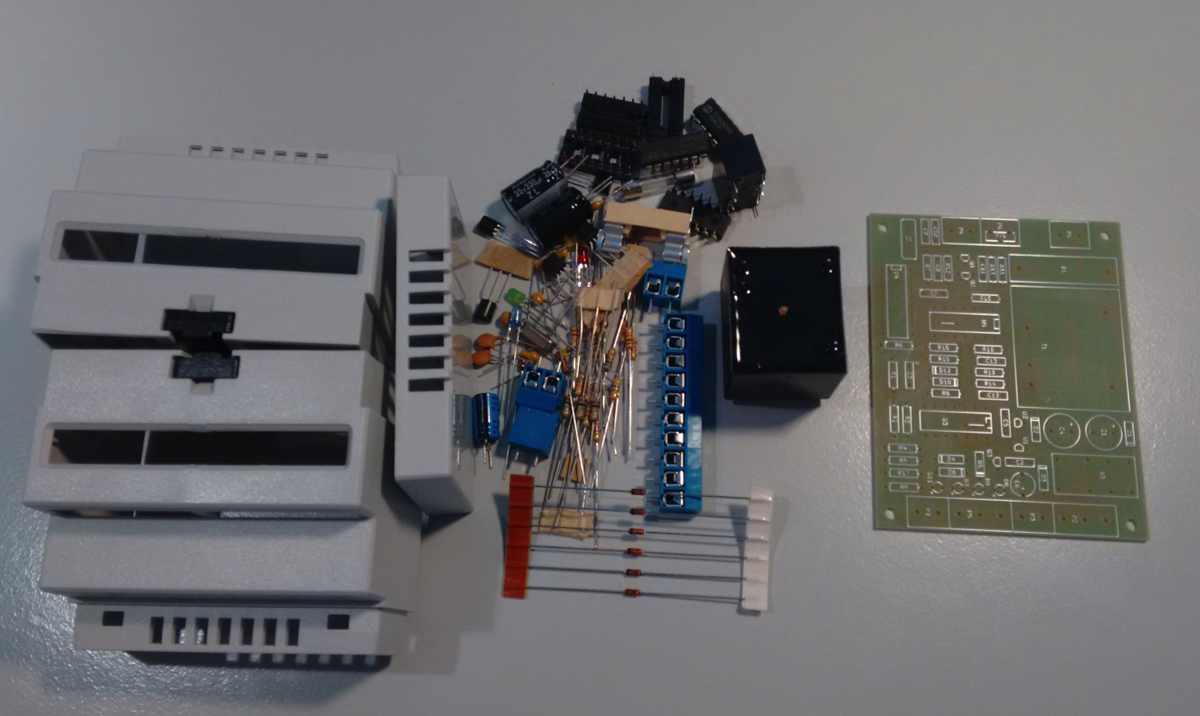
Der Bausatz enthält alle
Bauteile, die für den Bau und Test der AnalogEVSE Ladesteuerung
benötigt werden. Das Bestücken der Platine erfordert ein gewisses
Maß an Erfahrung im Umgang mit dem Lötkolben. Falsch eingelötete
Bauteile oder Lötzinnrückstände auf der Platine führen zu Fehl-
oder Nichtfunktion und können im schlimmsten Fall gefährliche
Folgen haben. Sauberes und sorgfältiges Arbeiten ist daher sehr
wichtig. Bitte lesen Sie diese Anleitung durch, bevor Sie mit dem
Zusammenbau beginnen.
10.2
Sicherheitshinweis
Bei dieser Schaltung
befinden sich 230V Netzspannung und Niederspannung auf der selben
Platine. Ist die Schaltung mit dem Stromnetz verbunden, ist daher
beim Hantieren mit der Platine äußerste Vorsicht geboten.
10.3 Werkzeug
Folgende Werkzeuge und
Geräte werden benötigt:
- ein feiner Lötkolben
und dünnes Lötzinn
- ein Seitenschneider
- evtl. eine kleine
Zange zum Zurechtbiegen von Anschlussdrähten
- ein Multimeter
- ein Oszilloskop oder
Frequenzzähler, alternativ eine Oszilloskop-App, Instrument
oder Stimmgerät
10.4 Vorbereitung
Prüfen Sie anhand der
Stückliste die Vollständigkeit der Bauteile und identifizieren Sie
die einzelnen Komponenten.
10.5 Zusammenbau
10.5.1 Allgemeine
Hinweise
Grundsätzlich empfiehlt
sich beim Zusammenbau der Steuerung folgendes Vorgehen:
- Bestücken und Test
des Netzteils
- Bestücken und Test
der Steuerung
- Einbau ins
Hutschienengehäuse
Alle Bauteile sollten so
eingelötet werden, dass sie möglichst fest auf der Platine
aufliegen und kein Spiel haben. Eine Ausnahme bilden die
Transistoren und Spannungsregler. Ihre Beinchen sollten in
eingelötetem Zustand 5-7mm lang sein.
10.5.2 Bestücken und
Test des Netzteils
Bauteile: P1, P4,
P6, F1, T1, D1, D2, C1, C2, C4, C5, U1, U2
Die Platine besitzt Löcher für verschiedene Trafotypen.
Zuerst wird der Trafo in die passenden Löcher eingesetzt und
verlötet. Bei Dioden und Elkos muss die Polarität beachtet werden.
Die Spannungsregler U1 und U2 sind verschiedene Typen
(positiv/negativ) und müssen an der richtigen Stelle eingesetzt
werden. Es empfiehlt sich, P4 und P6 vor dem Einsetzen
zusammenzuschieben.
Sind alle o.g. Teile eingelötet, wird die Sicherung eingesetzt und
die Platine mit 230V~ verbunden. Zwischen 0V (P4 Gnd) und Pin 3
der Sockel von U3/U5 müssen jetzt +12V messbar sein, zwischen 0V
und Pin 12 der Sockel -12V. Ist dies nicht der Fall, sofort
ausschalten und den Fehler suchen.
- Gibt es
Lötzinnbrücken auf der Platine?
- Ist die Sicherung
eingesetzt und noch ganz?
- Ist an der
Sekundärseite des Trafos eine Wechselspannung messbar?
- Sind die Dioden und
die Elkos richtig herum eingesetzt?
- Ist an den Pins der
Elkos eine Gleichspannung messbar?
- Sind die
Spannungsregler vertauscht?
10.5.3 Bestücken und
Inbetriebnahme
Hinweis für die
Platine v2.0.4 (Oktober 2021 und später): der Widerstand R20
wird aktuell nicht verwendet und muss durch einen Draht überbrückt
werden.
Zuerst werden die Dioden D10 und D12 bestückt. Die abgeschnittenen
Anschlussdrähte werden für die beiden Drahtbrücken verwendet und
die IC Sockel darüber eingelötet. Diese Reihenfolge ist wichtig.
Sind die IC erst einmal eingelötet, können die Drahtbrücken kaum
noch nachgerüstet werden. Danach werden die restlichen
Anschlussklemmen so eingesetzt, dass beim Bestücken die seitlichen
Führungen ineinander greifen und die Klemmen nahtlos verbinden.
Sie können auch vor dem Bestücken zusammengeschoben werden. Es
folgen alle Widerstände, die Kondensatoren, die restlichen Dioden,
der Quarz, die Transistoren und zuletzt das Relais. Sind alle
Teile verlötet, werden U3, U4 und U5 in die Sockel gesteckt.
Hierzu müssen die Beinchen ein wenig nach innen gebogen werden.
Nach einer sorgfältigen Kontrolle wird die Steuerung mit dem
Stromnetz verbunden. Jetzt sollte nur die gelbe Idle LED auf der
Platine leuchten. Leuchten auch andere LEDs, liegt ein Fehler vor.
- Gibt es
Lötzinnbrücken auf der Platine?
- Liegt die
Versorgungsspannung an?
- Sind die Dioden an
der richtigen Stelle und richtig herum eingesetzt?
- Sind die
Transistoren an der richtigen Stelle?
- Sind die ICs richtig
herum eingesetzt?
10.5.4 Einbau in das
Hutschienengehäuse
Das mitgelieferte
Hutschienengehäuse hat an der vorderen und hinteren Aussparung
je einen Mittelsteg, der leider beim Anschluss der LEDs bzw. des
externen Widerstands im Weg ist. Daher muss dieser Steg mit
einem scharfen Messer oder einem Seitenschneider entfernt
werden. Mit einer Feile können die Reste dann so abgefeilt
werden, dass der Eingriff nicht mehr sichtbar ist.
10.5.5 Stückliste
Alle benötigten Teile
sind in der Stückliste zusammengefasst.
11.
Testen
Wenn die Platine fertig
geätzt und fertig bestückt ist, stellt sich die spannende Frage,
ob die Schaltung auch wirklich funktioniert. Hierzu benötigt man
einen Fahrzeugsimulator und - wenn vorhanden - ein Oszilloskop.
Bei einer funktionierenden Schaltung geht es auch ohne
Oszilloskop, aber zur Fehlersuche ist es meistens unersetzlich.
Der Fahrzeugsimulator
ist eine einfache Schaltung, die das ordnungsgemäße Verhalten
des Autos sowie zwei Fehlerzustände simulieren kann. Den
Simulator gibt es bei OpenEVSE als Bausatz, aber die Schaltung
ist so einfach, dass sie auch leicht frei verdrahtet werden
kann.
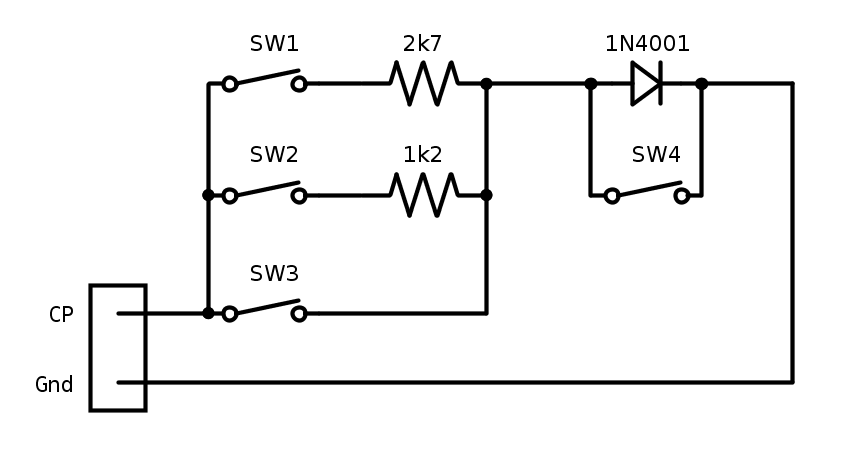 |
SW1
|
EV verbunden
|
SW2
|
EV Ladeanforderung (wenn SW1 eingeschaltet)
|
SW3
|
CP Kurzschluss
|
SW4
|
Diodenfehler
|
Wird das Pilotsignal von der AnalogEVSE Platine an den Simulator
angeschlossen, zeigen damit die Kontroll-LEDs auf der Platine
folgende Zustände an:
SW1
|
SW2
|
SW3
|
SW4
|
Zustand
|
LED
Idle
|
LED
Connected
|
LED
Charge
u. Relais
|
LED
Error
|
aus
|
aus |
aus |
aus |
Kein Fahrzeug
|
an
|
aus
|
aus |
aus |
an
|
aus |
aus |
aus |
Fahrzeug erkannt |
aus |
an
|
aus |
aus |
an
|
an
|
aus |
aus |
Fahrzeug lädt |
aus |
aus |
an
|
aus |
egal
|
an
|
aus |
Pilotsignal Kurzschluss |
aus |
aus |
aus |
an
|
| SW1 und/oder SW2 an |
an
|
Diodenfehler |
aus |
aus |
aus |
an
|
12.
Downloads
AnalogEVSE wurde mit
KiCAD 5.0.1 erstellt und bis auf KiCAD 7.0.6 aktualisiert. KiCAD
ist eine freie Software zum Erstellen von Platinen, die für
Windows, Linux und Mac OS X verfügbar ist. Die KiCAD
Projektdateien waren auf Github erhältlich. Da ich mit den neuen
Zugangsregelungen zu Github (2FA) nicht einverstanden bin, werde
ich Guthub nicht länger nutzen. Die Projektdateien sind daher ab
jetzt hier erhältlich. Diese sind allerdings mit Vorsicht zu
genießen, da sie nicht immer unbedingt funktionsfähig sind.
|
| Github: |
analogevse-kicad-v2.0.5.zip
Aktueller Stand der Projektdateien, mit Vorsicht zu
genießen, da nicht immer unbedingt funktionsfähig |
|
Schaltplan:
|
Hier
zum schnell mal anschauen: Analogevse-v2.0.5-schematic.pdf
Für eigene Entwicklungen oder genaue Untersuchungen
sollten besser die KiCAD Dateien verwendet werden, da sie
immer aktuell sind.
|
|
Zip-Archiv
der Version 1.8:
|
In
diesem Archiv ist die komplette Website zum Zeitpunkt der
Version 1.8 enthalten:
analogevse-v1.8.zip
Falls diese Dokumentation so überhaupt nicht zu Ihrer
Schaltung passen will, dann suchen Sie vermutlich diese
Dateien.
|
|
KiCAD:
|
Downloads
KiCAD Software Download
|
|
Verdrahtungsplan:
|
Wiring-AnalogEVSE-2.0.X.pdf
Verdrahtungsplan für eine komplette Ladebox mit AnalogEVSE
Ladesteuerung und Details zur Lastverteilung.
|
|
13.
Bestellen
Unter der u.g.
Email-Adresse können bei mir entweder die Platine alleine oder
ein vollständiger Bausatz inclusive Hutschienengehäuse bestellt
werden. Versandkosten sind bei Versand innerhalb Deutschlands im
Preis eingeschlossen. Bei Bestellung von mehreren Teilen wird
natürlich nur einmal Porto fällig.
Bitte entnehmen Sie das ungefähre Porto der Tabelle unten und
fragen Sie für Ihren speziellen Fall an.
Bei Bestellung eines
Bausatzes muss ich die teuren Teile erst besorgen. Die
Lieferzeit beträgt daher etwa eine Woche. Platinen habe ich
vorrätig und kann sie sofort versenden, solange der Vorrat
reicht.
Bitte beachten:
wer nur die Platine bestellt, muss alle Bauteile selbst
besorgen. Einige Bauteile (z.B. Trafo, Kondensatoren, Klemmen)
müssen in die Löcher der Platine passen und dürfen eine
bestimmte Größe nicht überschreiten, können also nicht beliebig
gewählt werden. Zudem ist die Größe der Platine genau auf dieses
spezielle Gehäuse zugeschnitten. Der Bausatz hingegen enthält
ein komplettes Paket passender Teile und ein Gehäuse, in das die
Platine genau hineinpasst.
|
|
Preis
|
Deutschland |
EU
|
Weltweit
|
Platine
Professionell gefertigte einseitige Platine mit
Lötstoplack und Bestückungsaufdruck
|
|
10€
|
kein
Porto |
+ 4€
Porto
|
+ 8€
Porto |
Bausatz
Alle Komponenten für eine vollständige Ladesteuerung:
Platine, Bauteile, Trafo, passendes Hutschienengehäuse
Ohne
Ladestrom-Kodierwiderstand Rext
|
|
50€
|
kein
Porto |
+ 4€
Porto |
+ 12€
Porto |
14.
Disclaimer
(C) 2015 - 2023 Bernhard
Walter
AnalogEVSE ist Open
Source Hardware. Ich habe sie für meine Zwecke entwickelt und
obwohl ich mir die größte Mühe gegeben habe, kann ich nicht
garantieren, dass das Design fehlerfrei ist. Nachbau und
Verwendung erfolgen auf eigenes Risiko.
Die Schaltung und die Dokumentation dürfen ohne Einschränkungen
nachgebaut, kopiert und verändert werden, solange das originale
Copyright und dieser Disclaimer erhalten bleiben.
Vorsicht beim Umgang mit
Netzspannung! Fehler können tödlich sein.
Ich distanziere mich ausdrücklich vom Inhalt verlinkter Webseiten.
Kontakt: analogevse@web.de
Changelog:
2015-11-19: Fehlerkorrektur im Platinenlayout, Version von 1.3 auf
1.4 erhöht
2015-11-22: PCB redesign für einen gängigen Transformator
2016-09-10: Version 1.8
2016-09-20: C11 hinzugefügt
2016-11-04: Ladestromtabelle korrigiert
2016-11-07: C10 in BOM korrigiert
2017-04-19: Neue Platinen Rev. 2, neue Email Adresse
2018-09-25: Kleine Korrekturen: C1 NP0, LED Zustände beim Testen
2019-01-01: Keine Platinen und Bausätze mehr verfügbar
2019-01-03: Update der Doku auf Version 2.0.0
2019-03-07: Fertigstellung Version 2.0.0
2019-08-21: PCB v2.0.1, BOM als xls
2020-12-21: Korrektur eines kleinen Fehlers in der Bauanleitung
2021-10-27: PCB v2.0.4 mit R20
2021-11-03: Umzug zu neuem Webhoster
2023-08-31:
Weg von github, v2.0.5 behebt den Fehler, dass CP ohne
Fahrzeug das Rechtecksignal statt 12V DC führt